
OceanScan-MST LAUV是一款为海洋学、水文测量学、水下安保以及监督调查而设计的新型独立的或联网的水下自主航行器。此款LAUV重量轻便,只需一人便可轻易的完成AUV的部署、操作以及回收。在LAUV的操作方面,用户无需花费昂贵的操作员训练费用。LAUV是一款用户可负担的、高操作性的、经济实用的调查工具。目前,LAUV已成功的用于世界各地的湖泊、河口、港口及海域调查。这款LAUV由来自波尔图大学的水下技术&系统实验室研发,此实验室为欧洲领先的水下机器人学实验室,并与OceanScan公司合作对LAUV进行了进一步的研发。
OceanScan-MST LAUV由LAUV本体、LAUV通讯装置和LAUV操控台三部分组成
LAUV本体

可搭载传感器:
- 水声Modem
- 侧扫声纳
- 数字相机+LED灯
- DVL
- 声速计(SVS)
- 前视声纳(FLS)
- 高精度INS
- CTD
- 水质传感器(pH/DO)
- 浊度计
- 散射计
- 荧光剂
- 单波束测深仪
LAUV通讯装置
LAUV通讯装置为一个hub,它支持与LAUV的无线和水声通讯。并且支持多个操作者在联网环境中,通过不同的平台(包括安卓智能手机)控制、监测多个载体。此装置由电池供电、完全自主、十分便携。如有需要,它可配置在一个防水箱中,可安装在浮标上。

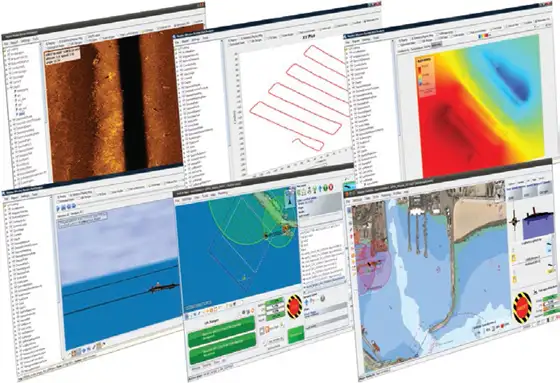
LAUV操控台
NEPTUS是LAUV操控的指挥和控制用户界面。这套软件支持一个周期完整的任务的每个阶段所需要的用户功能,包括:
- 载体的配置
- 地图、任务以及轨迹的设计
- 对载体状态的实时监控
- 任务控制:规划、开始、停止、暂停、终止
- 通过水声通讯实时监测任务执行情况
- 后期任务数据处理,通过图形对数据进行检索、分析
- 管理所有任务相关文件(清单、航海日志)
应用领域
- 水下监督
- 搜救(SAR)
- 港口安保
- 科学研究
- 环境调查
- 3D CTD成图
- 应急调查
- 水下机器人开发平台
- AUV训练平台
- 水道测量调查
- 清淤前/后监控
其它相关产品

YUCO-AUV-2
YUCO -AUV是法国公司Seaber独立自主研发,特点是单任务、成本低、体积小、重量轻、布放简单。相比较市面上AUV的高成本,这家公司致力于研发人人都能用得起的AUV。他们认为,AUV技术不应局限…

YUCO micro-AUV
YUCO micro-AUV是法国公司Seaber独立自主研发,特点是单任务、成本低、体积小、重量轻、布放简单。相比较市面上AUV的高成本,这家公司致力于研发人人都能用得起的AUV。 他们认…
OceanScan-MST LAUV
OceanScan-MST LAUV是一款为海洋学、水文测量学、水下安保以及监督调查而设计的新型独立的或联网的水下自主航行器。此款LAUV重量轻便,只需一人便可轻易的完成AUV的部署、操作以…

LAUV
OceanScan-MST LAUV是一款为海洋学、水文测量学、水下安保以及监督调查而设计的新型独立的或联网的水下自主航行器。此款LAUV重量轻便,只需一人便可轻易的完成AUV的部署、操作以…